How it works
1. Import Floorplan
BellRMF does not rely on a globally shared coordinate map. Instead, resources are defined based on named regions and human-readable zones.
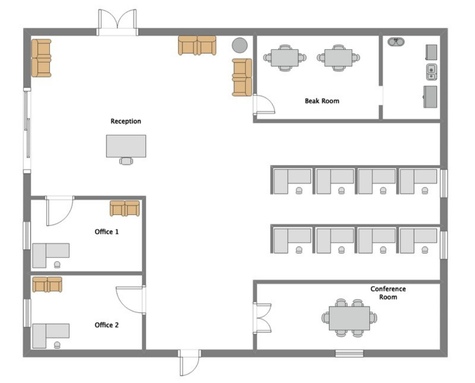
To get started, import an image of the building's floor plan.
2. Define Resources
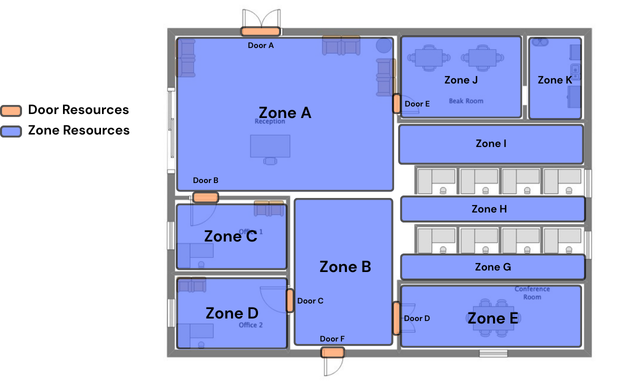
Use the visual editor to draw and label Zones, Doors, and Lifts directly on the floor plan.
This process is semantic only — it's meant to help robot developers understand what each resource name refers to. No coordinate alignment or robot map integration is required.
Below is an example of a floor plan with resources defined:
3. Reserve Resources
Suppose a robot’s mission is to travel from the main entrance to the Conference Room:
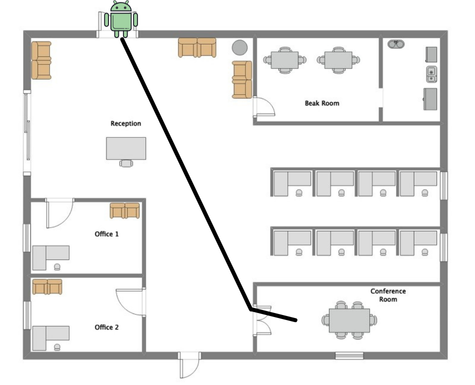
It is the robot developer’s responsibility to identify which shared resources the robot will pass through and reserve them ahead of time using BellRMF.
In this case, the robot should reserve:
Zone A, Zone B, Zone E, Door A, and Door D
using Resource Chaining to lock the entire path in one atomic operation. BellRMF will take note of the request and allocate the resource to the robot once it is available.

Once the reservation is granted, the robot may proceed with its mission — safely and without conflict.
4. Mission Complete
On mission complete, the resources should be released back to BellRMF, for it to reallocate to other robots requesting for the resource.